
Vision – The holy grail of robotics
We would like to have robots perform the tasks that we as humans do not want to do. Many of these fall into the heavy, dangerous, repetitive, precise, finicky categories. As humans we learned to accomplish these types of actions as little children, so we do not have a step by step roadmap on how to get this type of task done
The blind leading the blind
By UR INC Motoman SDA10 at Smith Springs Lab
Most of us who have implemented robots find that blind repetition of actions, however well conceived leads to less than desired results. Real processes are not perfectly consistent and real parts have tolerances. As engineers we normally try to compensate for the fliers that we have experienced, but new types of defects emerge in the global race to the bottom. For example it was only recently that I had to fight with bolts where the hex head was partially formed. This totally jams the automatic feeding and installation equipment. Dumb and happy. The robotic automation cannot cull out the defective parts which is a simple task for the humans that they replaced. Fortunately in this case, I included a proximity switch in my arm end that could be used for sorting.
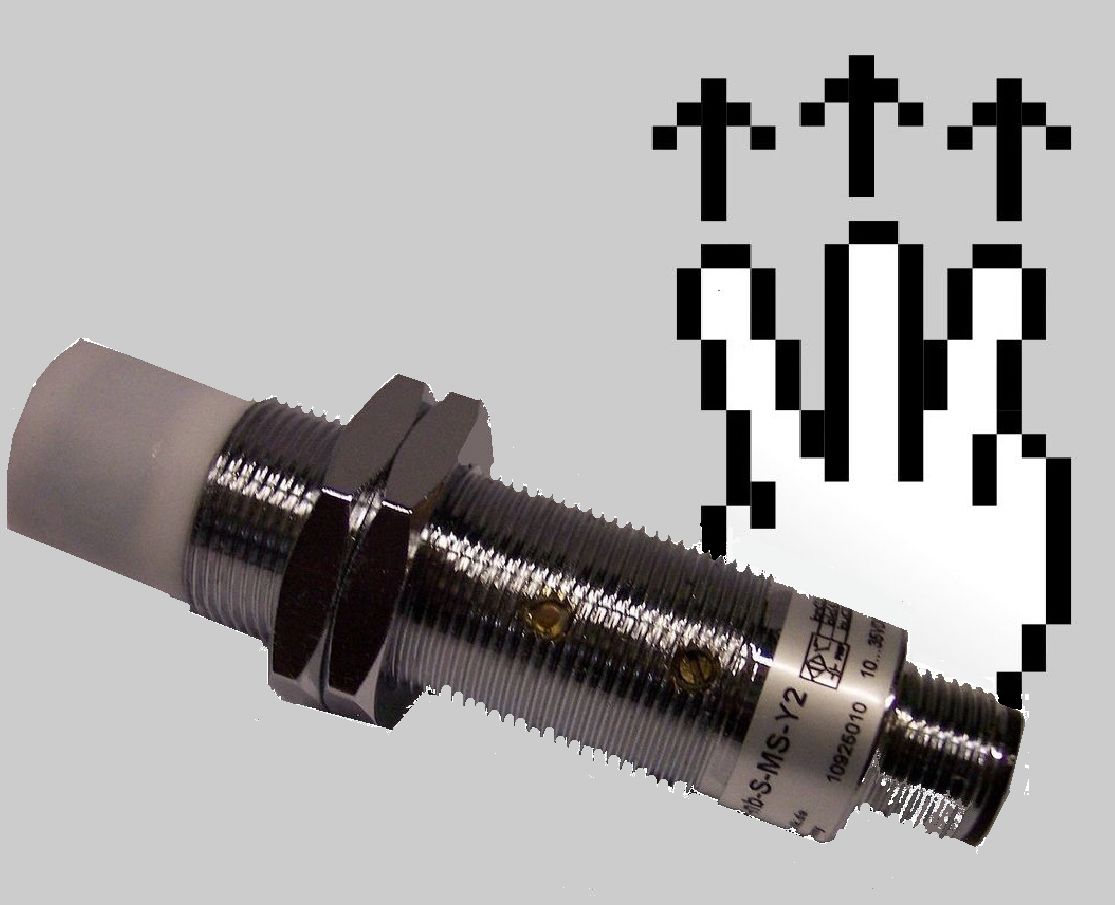
Capacitive proximity switches detect objects before they are hit
It is possible to use a proximity switch to measure to an accuracy down to .001 inch. (high accuracy measurements have a significant time penalty due to multiple probe motions) I recommend including extra vision catagory features when implementing new robot installations. In this fast changing business environment it is highly likely that your robots will need to be taught new tricks before they are taken out of service. Small investments in sensors like $100 proximity switches can be very useful in shortening the reaction time to unforeseen process challenges. The Fraunhoffer institute is pioneering in the implementation of capacitive “vision” In the linked article by Dr. techn. Norbert Elkmann the usefulness of advanced sensing is explored. “Manufacturing has great need of robots with high load carrying capacity for human-robot collaboration. Since the potential risk for humans in the event of a collision is naturally greater than when robots are smaller, the use of robots with high load carrying capacity in the direct vicinity of humans requires smart sensor systems such as capacitive sensors that detect proximity.” http://www.iff.fraunhofer.de/en/business-units/robotic-systems/capacitive-sensors.html
As we continue to use robots to replace humans, It will be necessary to create robots that incorporate human sensory capability. Touch will be one of the first areas that changes. Since material handling is one of the primary robot uses, controlling the applied force is a requirement. We have all been frustrated with the robot gripper in the arcade game. It drops the prize at every opportunity. If we wish to use a robot to replace humans the gripper needs tactile sensors. This mimics human touch using a strategy similar the human it replaces. Nerve endings, concentrated in our finger tips, transmit a whole bunch of data down the arm

Grippers have evolved from the arcade version to the state of the art Tactilus Multi-vector Sensor – Sensor Products Inc

by METRO66 Wheeler Dealer Bumper Cars
by Mariordo Driving Google Self-driving Car